Source: www.idtechex.com
Automation in the manufacturing industry is quickly gaining momentum with more companies adopting the use of robotics. This is attributed to the benefits of automation in business and the use of smarter and more intelligent processes. You get to have more production and also reduce the risk of injuries in the manufacturing plant. Most businesses are leaning towards the use of robotic arms to cater to pick & place, packaging, painting, and assembly among other tasks.
As you incorporate robotic arms into your business, ensure that you work with a quality robotic arm manufacturer who will offer you the best. Additionally, it is also essential to have a basic understanding of what they entail. The robotic arm features the body, wrist, and end effector that have specific functions. For these different parts to work accurately there needs to be the presence of robot joints. In this article, we’ll delve into the different robotic joints to give you a better understanding.
What are Robot Joints?
Source: www.researchgate.net
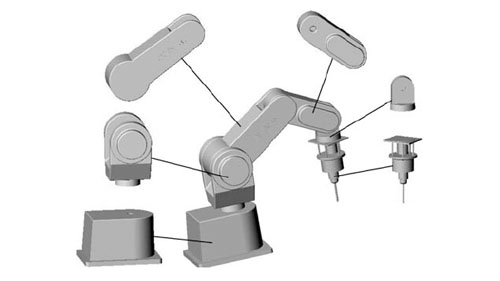
Robot joints refer to the movable components of the robot that result in relative motions between adjacent links. In this context, links are used to refer to the rigid members connecting the joints for clear and adequate functioning. This goes to show that the industrial robotic arm features the use of a combination of links and joints for optimal functionality. It is essential to ensure that the joints on your manipulator are working accordingly to ensure that there is precision and accuracy while in an application.
The robotic joints are also at times referred to as axes. They are essential and come in handy to ensure that the motion of the arm is not limited or interfered with. Learning more about the robotic joints will help you determine the type of robotic arm you want to work with depending on the tasks you want to cater to.
Types of Mechanical Joints for Robots
Source: www.britannica.com
Given that there are different types of robots used in the manufacturing industry, you’ll also find a variety of mechanical joints. These joints differ in terms of motion and also application especially when it comes to the type of robot to be used.
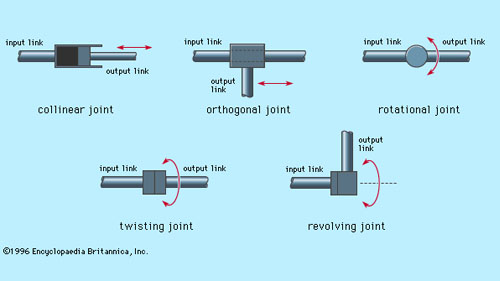
When it comes to the mechanical joints featured in robotic arms there are five principal types that you need to consider. Two of the joints are linear which means the relative motion between the adjacent links is translational. On the other hand, the other three are rotary which means the relative motion of the links involves rotations between them. The five types of mechanical joints for robots include:
Linear Joints
In the linear joints, the relative motion featured by the adjacent links is meant to be parallel. This means that the input and output links are sliding in a linear motion. This kind of movement results in a translational motion. This kind of linear motion can be achieved in several ways including the use of the telescoping mechanism and piston. This type of joint is also referred to as the L- joint.
Orthogonal Joints
The orthogonal joints are also popularly referred to as the type O-joints. They feature a relative movement taken by the input link and output link. This kind of motion involved in the Orthogonal joints is a translational sliding motion. However unlike the linear joints arrangement, with the Orthogonal joint, the output link is perpendicular to the input link.
Rotational Joints
When it comes to the rotational joints, you’ll find the use of rotational relative motions that come in handy for robot manipulators working multiple workspaces. These movements are carried out with the axis of rotation perpendicular to the axes of the input and output links. These rotational joints are also referred to as Type R joints.
Twisting Joints
This type of joint features rotary motion that also results in some degree of rotation when in use. The movement in these joints is relative to the axis of rotation that is perpendicular o the axes of the input and output links. The twisting joints are also referred to as type T joints.
Revolving Joints
In the revolving joints, things are a bit different compared to the others. These joints also feature a rotational movement that comes in handy in different applications. The movement of these joints features motion between the two links. The axis of the input link is designed to be parallel to the axis of rotation of the joint. On the other hand, the axis of the output link is designed to be perpendicular to the axis of rotation of the joint. This type of joint is also referred to as the Type V joint.
Different Types of Robots and the Mechanical Joints Used

Source: www.technologyreview.com
Different robots will feature the use of different types of mechanical joints. Learning more about the different robots will put you in a better position to invest in a robot that works for you. Some of the most common robots to consider include:
Articulated
The articulated robot design will most likely come with different ranges and combinations of rotary joints. This range may feature simple 2 joint structures and move to more complex structures with 10 or more joints. With this design, the arm is connected to the base with the use of a twisting joint while the links in the arm are connected by rotary joints.
Cartesian
With the cartesian robots, the design features the use of three linear joints. These joints are featured on the cartesian plane that involves X, Y, and Z. These robots may also feature an attached wrist with easier rotational joints for movement. This particular kind of robot is also referred to as rectilinear or gantry.
Cylindrical
The cylindrical robot features a rotary joint that is attached to the base and one linear joint used to connect the different links. Given that cylindrical robots work within a cylindrical-shaped work scope, the rotational and linear motion come in handy to ensure that precision is attained.
Polar
In the polar design of robots, the arm is connected to the base using a twisting joint. At times you’ll also find the use of a combination of two rotary joints and one linear joint. Since this robot is also referred to as a spherical robot, the work scope to be featured will also be spherical. The axes used in this robot form a polar coordinate system that allows the manipulator to work with ease.
SCARA
The SCARA robot is a popular option among many manufacturers especially those who are looking to automate their assembly processes. This robot is usually cylindrical and works in relatively cylindrical work scope. It features the use of two parallel joints that come in handy in the assembly process. These joints provide compliance in one selected plane as the robot is in use.
Delta
The delta robots are designed with a spider-like build that allows them to offer great services to their users. They are built from parallelograms that are joined and connected to a common base. The joints featured on this type of robot are both rotational and linear. This allows the robot to move a single end of arm tooling in a dome-shaped work area. It enhances its performance to ensure that the development of different tasks is carried out accurately.
Conclusion
When working with robotics as a means to automate different processes in your business, you need to keep in mind the different aspects. These aspects play a huge role in the performance of the specific robotics you choose to use. When it comes to using industrial robotic arms, the robot joints should be something to stay updated on.
Get to know the different joints and how they affect the performance of the robot. This will help you gauge the kind of joints that would best be suited for the activities you want to automate.
Once you have that, you can then invest in robot arms that come with the joints you are in the market for. Take your time and work with automation equipment manufacturers who will help you out.