
Source: Pinterest
The performance of industrial tasks has moved through transitions of improvement over time. Purely manual labor was improved upon by crude tools that were further advanced into machines. Still, more innovation keeps yielding new alternatives such as robots.
Unimate was the first-ever robot to be used successfully in manufacturing. It was invented by George Devol in the late ’50s and was first installed at the General Motors plant. It was used for die casting and could move within a 12 feet radius. Upon witnessing the benefits of using it, soon enough, more companies sought to acquire it.
Since then, experts have continued to create different robots and explore new ways in which they can be applied in manufacturing. Nowadays, there are many sophisticated suppliers such as EVS have the ability to offer innovative and advanced industrial robotic arms for sale.
Below is a look at the different types of robots and their features.
Table of Contents
SCARA Robots

SCARA robots, based on the robots’ axes of movement, are more modern compared to pick and place industrial robots. Both may serve the same function, but SCARA robots easily edge out the other resoundingly.
A SCARA robot consists of a base which is connected to the robot arm in a parallel-axis layout. The rotary joints provide compliance in the XY plane. In other words, the arm of a SCARA robot can move from left to right as well as back and forth. It, however, is rigid in the Z-axis such that it can only rotate on a theta-axis.
The design provides 4 degrees of freedom. Further, the arm can be folded back or outstretched. It is a feature that comes in handy depending on what length is necessary for the task it is being used for.
In regard to software, SCARA robots are designed to automate tasks but under the controller’s instruction. The controller interface is easy to use and they tend to be responsive to commands.
Given that they come as a ready-made solution there is little if any additional programming required.
Pros
- SCARA robots are very fast given the flexibility provided by the rotary joints that hold the arm in place
- While they do not take up expansive space to execute their tasks, the arm covers a large area as it works. They can pick and place, over a considerable radius
- They are highly accurate
- Can handle a high payload
Cons
- They can only function when placed on or attached to a plane surface thereby offering limited placement flexibility
- Require a dedicated controller
Industrial Applications
The pick and drop abilities of a SCARA robot make it suitable for:
- Palletizing
- Loading machines
- Assembly functions
- Laser engraving with the aid of an appropriate end-effector
- Soldering
Delta Robots

Source: Pinterest
Delta robots were invented by Reymond Clavel and a team of scholars at a college in France. They are also known as parallel robots.
The design of a Delta robot consists of a base mounted overhead that has 3 motors that drive the arms linked to the base. The parallel arms have both prismatic and rotary joints which are not common among other robots. As a result, it can move on the X, Y axes although most users customize their robots to add extra axes. A rotation or pitch axis can both be achieved by modification so as to fulfill certain tasks.
Given as Delta robots are often used for pick and place automation on conveyor systems, programming determines their effectiveness. They are also fitted with cameras which in conjunction with special software make up their vision system. The purpose of the vision system is to differentiate good and bad products during picking and sorting.
Suitable end-effectors are usually attached to the arms but they require special design schemes. Any additional weight on the arms reduces the high-speed robot arm performance they are favored for. Suction cups are particularly popular with them.
Pros
- They are the fastest and even surpass SCARA on the goal-post test
- Can work over a large workspace
- Advanced software makes them very accurate and efficient
Cons
- Can only manage very light payloads
- High-speed repetitive movements result in wear and tear of parts
- They are expensive
Industrial Applications
- Flight simulators – this involves an enhanced version that uses 6 additional linear actuators and a movable base
- Pharmaceutical industry
- Food packaging
- Low-force assembly tasks
Polar Robots

Source: Pinterest
The structure of a polar robot comprises a base onto which an arm is attached. The arm is affixed using a twisting joint. They are also known as spherical robots due to the shape of the workspace associated with them. They have a lot in common with Unimate which was also spherical.
A polar robot’s arm can be elongated although it is only limited to the radius around the machine. It has three axes that form what is referred to as the polar coordinate system. It means that the points within reach of the robot arm are determined by the distance it can stretch from the robot base at a set angle.
Pros
- The arm can reach under or above obstacles
- They have a 360-degree coverage span
- They work over a large workspace
Cons
- They demand a lot of supervision and control
- Poor accuracy
- Considering their movement, they would not be ideal for repetitive tasks
Industrial Applications
- Die-casting
- Welding
- Injection molding
- Handling glass products
Cylindrical Robots

Source: Pinterest
There are two main parts on a cylindrical robot, a rotary and linear actuator attached to the cylindrical base. They are responsible for the vertical and horizontal movements that the robot arm can make. A pivoting shaft facilitates the working of the robot in a cylindrical work area.
Further, the arm is capable of elongation and folding back to position. Its streamlined design makes it possible for it to work in limited space that more bulky arms may not fit in. On the other hand, rotation is only feasible along the vertical axis.
Cylindrical robots come already assembled so there are no installation hiccups to be expected unless in cases where customization is deemed necessary.
Pros
- Can manage heavy payloads
- Have 360 degrees reach around themselves
- They do not take up much space in comparison to their workspace radius
Cons
- Limited rotary motion
- Low accuracy
- They are not as versatile as other options available.
Industrial Applications
- Foundry and forging works
- Application of coating
- Die-casting
- Loading and unloading machines
- Laboratory and Biomed applications favor them due to size and the positioning of the arm.
Cartesian Robots

Source: Pinterest
The 3 axes of a Cartesian robot are all perpendicular to each other. Movements are facilitated by:
- 3 prismatic joints that work in sliding motion along the XYZ axes.
- Linear actuators
- Motors to supply power
- A wrist attachment where rotation is needed
They usually come in parts and require assembling by a factory’s machinery experts. While their assembly can be complex it provides a chance for customizations to be done. In fact, it is one of the reasons that make it popular. Precision, speed, and the length of strokes can be adjusted depending on the industry or application.
Cartesian robots are also referred to as Gantry or rectilinear robots. They take up a cubicle shape in terms of their working area. However, one notable characteristic is that they can be mounted in different fashions when necessary. They adapt to overhead mounting as well as vertical and horizontal positions.
Pros
- They can take on a large payload
- Operationally, they are quite versatile
- Affordable
- Can be programmed using online mode
- They have good levels of accuracy
Cons
- Only one axis movement can happen at a time
- They take up a lot of space
- The installation process is generally complex
Industrial Applications
- Handling for plastic molding processes
- Sealing tasks
- 3D printing
- Loading and unloading
Articulated Robots/ 6-Axis

The revolute joints of articulate robots allow them a range of movement similar to that of the human arm. They are flexible through the X, Y, Z axes yet can also roll, pitch, and yaw.
The basic design is made up of a base and an arm that are joined using a rotary joint. The number of rotary joints can be increased to as much as 10 and can be either parallel or orthogonal.
Given the 6-axis movement capabilities, these robots can perform tasks that most can not. The arm is highly responsive and elongates to its full length quite fast. In terms of control, they require well-configured software if they are to function at optimum levels. Due to their large range of motion, the programming process can be complex. However, some manufacturers offer custom preset control packages.
Pros
- They can reach and maneuver in areas that other robots can not
- They cover a large working radius
- High speed robot arm
- Perform well in unique controller tasks such as painting
- Heavy payloads can be tolerated
Cons
- The kinematic operations can be complicated
- They require a dedicated controller
- Expensive
Industrial Applications
- Automotive assembly
- Food packaging
- Foundry and forging tasks
- Steel cutting
- Glass handling
- Metal casting
Cobots

Source: Pinterest
Cobots are also known as collaborative robots as they are designed to co-work with human beings. Traditional robots presented challenges such as collisions with workers in factory spaces. To prevent such accidents, cobots were created as a safer alternative.
There are three main types of cobots:
Hand-guiding cobots
They are programmed by technicians using a hand-operated device to train the robot arms on the desired movements.
Speed and Automation Cobots
They are basically traditional industrial robots with vision systems. They have a warning and a stop zone. When a worker enters the warning zone, they automatically slow down their operation. If they proceed nearer into the stop zone, the cobot stops functioning entirely. They resume operation when both zones are free of obstructions.
Power and Family Force Limiting Cobots
They are capable of co-working with human beings but are not fitted with any vision systems, scanners, or safety barriers. Instead, they are designed with no exposed motors or sharp corners. In addition, they have collision motors that stop them when there are obstructions around them.
Safety Monitored Stop Cobots
Compared to other robots they are the least ‘human-friendly’. However, they do have safety sensors that stop and re-engage operation when they detect a human obstruction.
Factors that Differentiate Robots
Industrial robots tend to have common features such as robot arms. However, they are fundamentally different in terms of design aspects such as:
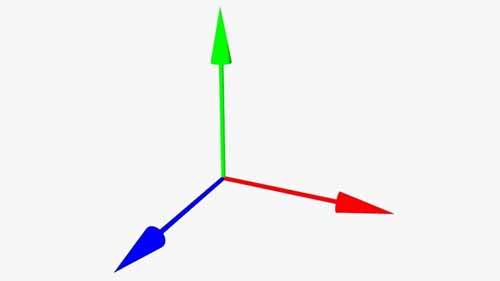
Axis
Source: Pinterest
As in a mathematical graph, the axes of a robot refer to the directions a robot arm can move in. There are X, Y, and Z axes. They represent back/forth, left/right and up/down respectively.
Degree of Freedom
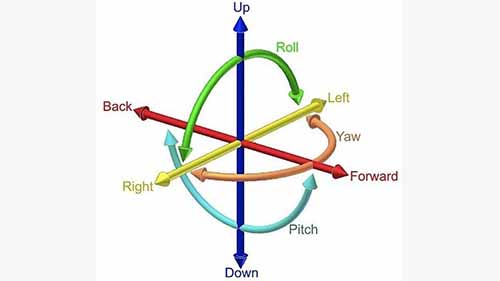
Source: Pinterest
A robot’s degree of freedom is a description of the range of movements it has in a 3D space. In addition to the three axes, freedom includes aspects such as rotation, yaw, and pitch.
The number of axes a robot has determines its degree of freedom.
Workspace
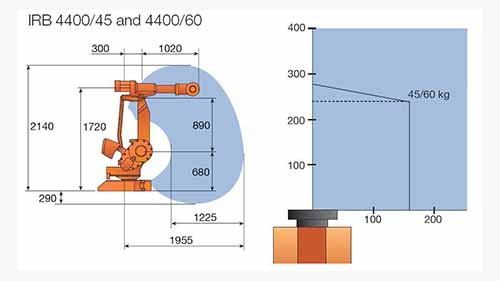
Source: robots.com
Consider, for instance, that a robot is being used to pick oranges from one cart to another. The distance it covers between the two carts is referred to as its workspace. Some robots, based on their structure, can cover wider distances more than others. Moreover, factors such as freedom and arm length give a robot more working range.
End-effector

Source:roboticsandautomationnews.com
In terms of design, the robot arm really is an imitation of the human arm. They may vary in dexterity and capability but the underlying concept is the same.
That said, an end-effector is basically the ‘hand’ attached to the end of a factory robot arm. There are many types of end-effectors, they vary based on tasks. Some examples include grippers, welding tools, and suction cups.
Joints

Source:Pinterest
The use of joints ensures the robot arm stays attached to the structure while also facilitating its movements. The type of joint a robot has, plays a big role in its flexibility and range of motion. They include:
Parallel joints – as the name suggests, they are situated alongside each other and are usually preferred for linear movements.
Prismatic joints- they are also known as sliders because they provide linear sliding movement between two parts of a robot.
Revolute joints- they are ideal when flexibility such as multi-dimensional rotation is intended.
Rotary joints- any degree of rotation would require one or more of these joints. Although, they are more limited in range in comparison to the revolutionary joint.
Motors

Source: Pinterest
For the robot arms to move and execute commands, they require a power source. Motors convert electrical energy to power the robotic arms.
Programming

Source:visualcomponents.com
It involves the use of software to control how a robot operates. Performance parameters such as speed, repeatability, and the stroke length of arm movements can be managed by programming.
Every robot has its own kind and level of programming with some being more advanced than others. Further, in some cases, robots are pre-programmed while others are customizable. There are also physical controller interfaces that are used to give instructions to the robots.
Impacts of Robots on Manufacturing

Source:Pinterest
Undoubtedly, the manufacturing industry across the globe would not be what it is in the absence of robots. They have had a great effect on:
Scales of Production

Source: Pixabay
Robots have enabled factories to scale up production and still manage shorter turn-around times. Operational speeds such as those of the Delta robot make it possible for more units of products to be processed.
Cost of Production

Source: Pixabay
Given as robots take on a large workload, they reduce the number of employees that need to be hired. Further, their automated mechanical nature makes them more streamlined in operation than manual methods. Suffice it to say, they reduce wastage.
Staff Safety

Source: Pixabay
Since the early days of Unimate, robots have been used to take on difficult and dangerous tasks. Die-casting, welding, and lifting heavy loads in risky spaces are just a few examples of high-risk manufacturing processes. The use of robots such as robotic aluminum welding protects workers from attendant dangers.
However, on the flip side, robots also do pose dangers to workers around them. For instance, when their speed is set too high, the end-effectors or arms can malfunction and haphazardly drop the load.
Human Resources

Source: Pixabay
One of the main contentions against robots and automation, in general, is the fear that they would replace human labor. Indeed some people have lost jobs after being made redundant by such technology. However, even with artificial intelligence, it is unlikely that robots will ever fully become as intuitive or creative as mankind.
As robots take on the predictable repetitive tasks, workers could perhaps adapt to the disruption by taking on other complex tasks. Creativity and design, for instance, will always require the nuances of human emotions and thought.
Conclusion
There is certainly no going back to the manual way of production, automation is here to stay. As more innovations change and improve on the existing types of robots, manufacturers will have to keep up. After all, better machinery leads to more efficient production lines and higher quality products.
If you are looking to automate your business, you now have all the facts on all types of robots and their functions. Be sure to work with reputable industry experts to explore what product options are available in the market. On the upside, whatever you choose, you will be making a well-informed choice.