
| Model | QJR10-1 | |
| Axis Number | 6 | |
| Payload | 10kg | |
| Repeat Positioning | ±0.05mm | |
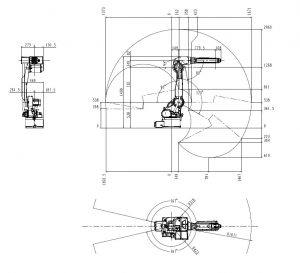
| Max Armspan | 1671mm | |
| Motion Range | J1 | ±172º |
| J2 | ﹢166º,﹣107º | |
| J3 | ﹢83º,﹣92º | |
| J4 | ±170º | |
| J5 | ±125º | |
| J6 | ±360º | |
| Max Speed | J1 | 172º/s |
| J2 | 172º/s | |
| J3 | 183º/s | |
| J4 | 430º/s | |
| J5 | 430º/s | |
| J6 | 584º/s | |
| Allowable Torque | J4 | 24.6N.m |
| J5 | 24.6N.m | |
| J6 | 9.8N.m | |
| Inertia Moment | J4 | 0.63kg.m² |
| J5 | 0.63kg.m² | |
| J6 | 0.1kg.m² | |
| Robot Body Weight | 250kg | |
| Power Capacity | 3.3kVA | |
| Cabinet Size | 580*600*960mm | |
| Cabinet Weight | 130kg | |
| Source | Three-phase four-wire | |
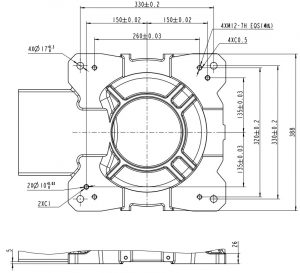
| Installing Form | Ground, Ceiling | |
| Application | Welding, painting, loading and unloading, handling, sorting, assembly etc. | |
 en
en 



 Arabic
Arabic Bulgarian
Bulgarian Czech
Czech Danish
Danish Dutch
Dutch Estonian
Estonian Finnish
Finnish French
French Georgian
Georgian German
German Greek
Greek Hungarian
Hungarian Icelandic
Icelandic Irish
Irish Italian
Italian Japanese
Japanese Korean
Korean Latvian
Latvian Lithuanian
Lithuanian Luxembourgish
Luxembourgish Myanmar (Burmese)
Myanmar (Burmese) Norwegian
Norwegian Persian
Persian Polish
Polish Portuguese
Portuguese Romanian
Romanian Russian
Russian Serbian
Serbian Slovak
Slovak Slovenian
Slovenian Spanish
Spanish Swedish
Swedish Thai
Thai Turkish
Turkish Ukrainian
Ukrainian Vietnamese
Vietnamese